
All the previous labs are preparatory for this lab: controller design. Given a dynamic system, how can we design a controller to make it stable (such as make a drone hover in air), track a desired trajectory (make a robotic arm follow a line for welding), etc.? In this lab, we will practice how to design controllers based on state-space models for mechanical systems. You will learn how to analyze their controllability, connect the controller and the dynamics of the systems, and design controllers that achieve desired closed-loop performance. Through hands-on exercises, you will use the Python Control Systems Library to:
Model both linear and nonlinear systems
Test system controllability
Design state-feedback controllers using eigenvalue assignment techniques
Compute feedforward gains to enable accurate reference tracking
Simulate and visualize the time response of both open-loop and closed-loop systems
By the end of this lab, you will gain practical experience in applying modern control design methods to real-world mechanical systems using Python.
Setup (run once per environment)¶
We first need to install python-control (and import required libraries) every time you open this notebook, to ensure all dependencies are available in your current environment.
import numpy as np
import matplotlib.pyplot as plt
# Import the python-control package
try:
import control as ctl # ctl is the alias for control
print("python-control", ctl.__version__)
except ImportError:
%pip install control
import control as ctl
%matplotlib inline
plt.rcParams['figure.figsize'] = (7, 4)
plt.rcParams['axes.grid'] = Truepython-control 0.10.2
Task 1 — Conroller Design for Coupled Mass Spring System¶
In this task, we will design a controller for the coupled mass-spring system using the Python Control Systems Library.
System dynamics¶
For completeless, we include the dynamics of the system again here
or in state space form, with state vector where
(position of mass 1)
(position of mass 2)
(velocity of mass 1)
(velocity of mass 2)
For output, we consider we are only interested in the position of mass one for now. In this case, we have output of
# Define the parameters for the system
m, c, k = 1, 0.1, 2
# Create a linear system
A = np.array([
[0, 0, 1, 0],
[0, 0, 0, 1],
[-2*k/m, k/m, -c/m, 0],
[k/m, -2*k/m, 0, -c/m]
])
B = np.array([[0], [0], [0], [k/m]])
C = np.array([1, 0, 0, 0])
D = 0
# Create a state-space system using A, B, C, D
# https://python-control.readthedocs.io/en/0.10.2/generated/control.ss.html
sys = ctl.ss(A, B, C, D, outputs=['q1'], name="coupled spring mass")
print(sys)<StateSpace>: coupled spring mass
Inputs (1): ['u[0]']
Outputs (1): ['q1']
States (4): ['x[0]', 'x[1]', 'x[2]', 'x[3]']
A = [[ 0. 0. 1. 0. ]
[ 0. 0. 0. 1. ]
[-4. 2. -0.1 0. ]
[ 2. -4. 0. -0.1]]
B = [[0.]
[0.]
[0.]
[2.]]
C = [[1. 0. 0. 0.]]
D = [[0.]]
Controllability Testing¶
# Compute the controllability matrix and its rank and determinant
ctrb = ctl.ctrb(A, B)
rank = np.linalg.matrix_rank(ctrb)
determinant = np.linalg.det(ctrb)
print(f"Controllability matrix:\n{ctrb}")
print(f"Determinant: {determinant} (nonzero means full rank)")
print(f"Rank: {rank} (should be {A.shape[0]} for controllable system)")Controllability matrix:
[[ 0. 0. 0. 4. ]
[ 0. 2. -0.2 -7.98 ]
[ 0. 0. 4. -0.8 ]
[ 2. -0.2 -7.98 1.598]]
Determinant: -63.99999999999998 (nonzero means full rank)
Rank: 4 (should be 4 for controllable system)
Controller Design¶
Now we can design a state-feedback controller to make the output track a desired value .
# We assume the following desired closed-loop poles (eigenvalues)
desired_eigenvalues = [-2, -2.5, -3, -3.5] # original choice
# Alternative choices:
# desired_eigenvalues = [-2 + 1j, -2 - 1j, -3 + 2j, -3 - 2j]
# Place the poles using state feedback (assuming full state feedback)
K = ctl.place(A, B, desired_eigenvalues)
print("State feedback gain K:", K)
# Compute feedforward gain for reference tracking (for output y = q1)
A_cl = A - B @ K
Kf = (-1 / (C @ np.linalg.inv(A_cl) @ B))
print('Kf: '+str(Kf))
State feedback gain K: [[-25.535 17.83 8.046 5.4 ]]
Kf: [13.125]
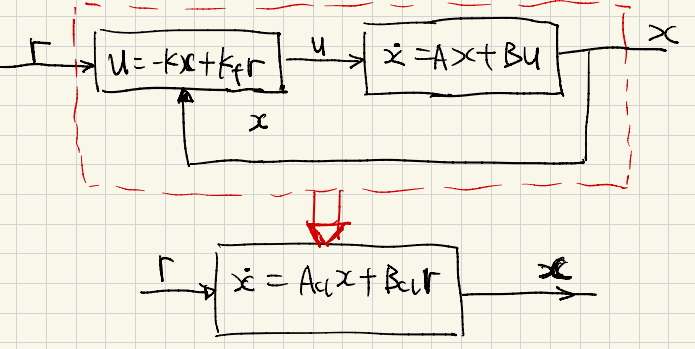
Simulate the closed-loop system¶
Now that we have our gains designed, we can simulate the closed loop system: $$
$A_{cl} = A-BKB_{cl} = Bk_fA_{cl}ur$. This is shown in the following figure.
# Create a closed loop system
A_cl = A - B @ K
B_cl = B * Kf
clsys = ctl.ss(A_cl, B_cl, C, 0)
print(clsys)<StateSpace>: sys[8]
Inputs (1): ['u[0]']
Outputs (1): ['y[0]']
States (4): ['x[0]', 'x[1]', 'x[2]', 'x[3]']
A = [[ 0. 0. 1. 0. ]
[ 0. 0. 0. 1. ]
[ -4. 2. -0.1 0. ]
[ 53.07 -39.66 -16.092 -10.9 ]]
B = [[ 0. ]
[ 0. ]
[ 0. ]
[26.25]]
C = [[1. 0. 0. 0.]]
D = [[0.]]
# Plot the step response with and without the controller
tvec = np.linspace(0, 10, 100)
U = 1 # Step input magnitude
r = 1 # Reference value
# Closed-loop response (with controller)
time_op, output_op = ctl.input_output_response(clsys, tvec, U)
# Open-loop response (no controller)
time_ol, output_ol = ctl.input_output_response(sys, tvec, U)
plt.plot(time_op, output_op, label='Closed-loop (with controller)')
plt.plot(time_ol, output_ol, label='Open-loop (no controller)')
plt.plot([time_op[0], time_op[-1]], [r, r], '--', label='Reference $r$')
plt.legend()
plt.ylabel("Output")
plt.xlabel("Time $t$ [sec]")
plt.title("Step Response: Closed-loop vs Open-loop")
plt.show()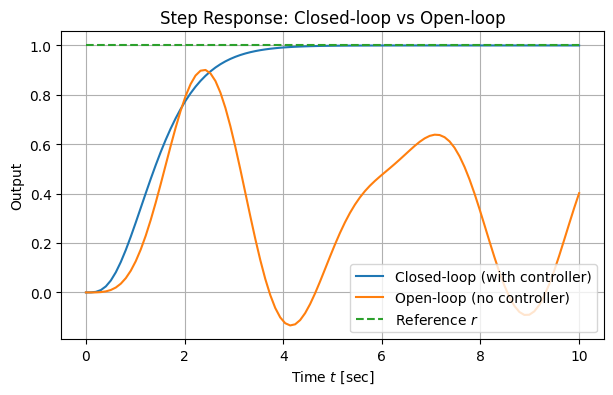
Task 2 — Conroller Design for Pendulum System¶
In this task, we will design controllers for the pendulum system. For completeness, we include the dynamics equation here again:
where:
(angle)
(angular velocity)
(N.m.s/rad, damping coefficient)
We begin by creating a nonlinear model of the system:
# Parameter values for pendulum
pendulum_params = {
'g': 9.81, # Gravitational acceleration (m/s^2)
'L': 1.0, # Pendulum length (m)
'b': 0.5, # Damping coefficient (N.m.s/rad)
'm': 1.0, # Pendulum mass (kg)
}
# State derivative for pendulum
def pendulum_update(t, x, u, params):
# Extract the configuration and velocity variables from the state vector
theta = x[0] # Angular position of the pendulum
thetadot = x[1] # Angular velocity of the pendulum
tau = u[0] # Torque applied at the pivot
# Get the parameter values
g, L, b, m = map(params.get, ['g', 'L', 'b', 'm'])
# Compute the angular acceleration using pendulum dynamics
# x_dot_1 = x_2
# x_dot_2 = -g/L * sin(x_1) - b/(m*L^2) * x_2 + u/(m*L^2)
dthetadot = -g/L * np.sin(theta) - b/(m*L**2) * thetadot + tau/(m*L**2)
# Return the state update law
return np.array([thetadot, dthetadot])
# System output (angle only, as specified y = x_1)
def pendulum_output(t, x, u, params):
return np.array([x[0]]) # Output y = theta (x_1)
# create the nonlinear system using nlsys,
# note that the outputs is theta so that we can successfully connect the controller to it
pendulum = ctl.nlsys(
pendulum_update, pendulum_output, name='pendulum',
params=pendulum_params, states=['theta', 'thetadot'],
outputs=['theta'], inputs=['tau'])
print(pendulum)
print("\nParams:", pendulum.params)<NonlinearIOSystem>: pendulum
Inputs (1): ['tau']
Outputs (1): ['theta']
States (2): ['theta', 'thetadot']
Parameters: ['g', 'L', 'b', 'm']
Update: <function pendulum_update at 0x7d1e3c981bc0>
Output: <function pendulum_output at 0x7d1e3c980ae0>
Params: {'g': 9.81, 'L': 1.0, 'b': 0.5, 'm': 1.0}
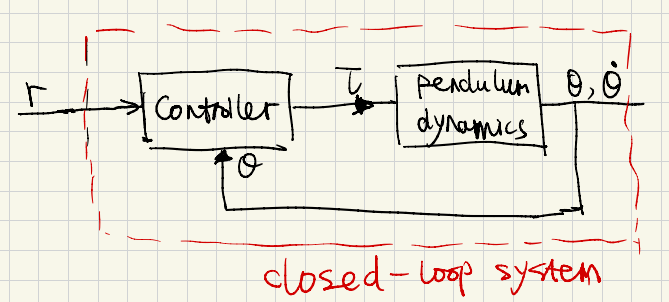
Proportional feedback controller¶
We first try to stabilize the system at using a simple proportional feedback controller:
This controller can be designed as an input/output system that has no state dynamics, just a mapping from the inputs to the outputs.
Inputs and outputs for each block that we will create:
Controller
Inputs: (measured angle from pendulum), (reference/desired angle)
Output: (control torque to be applied to the pendulum)
Pendulum dynamics
Input: (control torque from controller)
Outputs: (pendulum angle), (angular velocity)
Closed-loop system
Input: (reference/desired angle)
Output: (pendulum angle)
This separation of roles allows us to connect the controller and the plant (pendulum) in a feedback loop, where the controller processes the measured output and reference to generate the appropriate input for the plant.
# Set up the controller
def propctrl_output(t, x, u, params):
kp = params.get('kp', 1)
return -kp * (u[0] - u[1]) # u[0] is theta, u[1] is r, which is the desired angle
# Create the proportional controller as a nonlinear system
propctrl = ctl.nlsys(
None, propctrl_output, name="p_ctrl",
inputs=['theta', 'r'], outputs='tau'
)
print(propctrl)<NonlinearIOSystem>: p_ctrl
Inputs (2): ['theta', 'r']
Outputs (1): ['tau']
States (0): []
Update: <function NonlinearIOSystem.__init__.<locals>.<lambda> at 0x7d1e3c9c51c0>
Output: <function propctrl_output at 0x7d1e3c9c53a0>
To connect the controller to the system, we use the interconnect function, which will connect all signals that have the same names:
# Create the closed loop system
clsys = ctl.interconnect(
[pendulum, propctrl], name='pendulum w/ proportional feedback',
inputs=['r'], outputs=['theta'], params={'kp'})
print(clsys)<InterconnectedSystem>: pendulum w/ proportional feedback
Inputs (1): ['r']
Outputs (1): ['theta']
States (2): ['pendulum_theta', 'pendulum_thetadot']
Subsystems (2):
* <NonlinearIOSystem pendulum: ['tau'] -> ['theta']>
* <NonlinearIOSystem p_ctrl: ['theta', 'r'] -> ['tau']>
Connections:
* pendulum.tau <- p_ctrl.tau
* p_ctrl.theta <- pendulum.theta
* p_ctrl.r <- r
Outputs:
* theta <- pendulum.theta
We can now linearize the closed loop system at different values of and compute the eigenvalues to check for stability:
for kp in [0, 1, 10]:
lin_sys = clsys.linearize([np.pi, 0], [0], params={'kp': kp})
A = lin_sys.A
eigvals = np.linalg.eigvals(A)
print(f"kp = {kp}; A =\n{A}\neigenvalues = {eigvals}\n")kp = 0; A =
[[ 0. 1. ]
[ 9.81 -0.5 ]]
eigenvalues = [ 2.89205347 -3.39205347]
kp = 1; A =
[[ 0. 1. ]
[ 8.81 -0.5 ]]
eigenvalues = [ 2.7286742 -3.2286742]
kp = 10; A =
[[ 0. 1. ]
[-0.19 -0.5 ]]
eigenvalues = [-0.25+0.35707142j -0.25-0.35707142j]
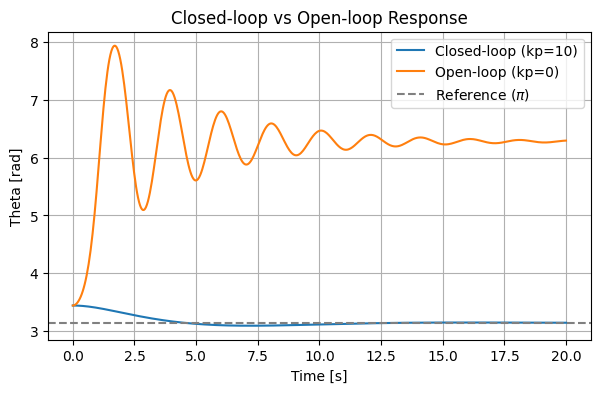
Now we can simulate the closed-loop system (with proportional control) and open-loop (no control)
timepts = np.linspace(0, 20, 500)
x0 = [np.pi + 0.3, 0] # initial condition: slightly perturbed from upright
# Closed-loop: kp = 10
# U=np.full_like(timepts, np.pi) creates the reference input signal for the simulation.
Cl_response = ctl.input_output_response(
clsys, timepts, U=np.full_like(timepts, np.pi), X0=x0, params={'kp': 10}, return_x=True
)
# Open-loop: kp = 0
Ol_response = ctl.input_output_response(
clsys, timepts, U=np.full_like(timepts, np.pi), X0=x0, params={'kp': 0}, return_x=True
)
plt.plot(timepts, Cl_response.outputs, label='Closed-loop (kp=10)')
plt.plot(timepts, Ol_response.outputs, label='Open-loop (kp=0)')
plt.axhline(np.pi, color='gray', linestyle='--', label='Reference ($\pi$)')
plt.xlabel('Time [s]')
plt.ylabel('Theta [rad]')
plt.title('Closed-loop vs Open-loop Response')
plt.legend()
plt.show()<>:17: SyntaxWarning: invalid escape sequence '\p'
<>:17: SyntaxWarning: invalid escape sequence '\p'
/tmp/ipython-input-997698303.py:17: SyntaxWarning: invalid escape sequence '\p'
plt.axhline(np.pi, color='gray', linestyle='--', label='Reference ($\pi$)')
State space controller¶
For the proportional controller, we have limited control over the dynamics of the closed loop system. An alternative is to use “full state feedback” for reference tracking, in which we set
where is the feedback gain and is the feedforward gain for tracking the reference . Note that we use and here to indicate we linearize the system at an operating point.
We have verified in class the linearized system around is controllable.
# Linearize the original pendulum system around theta = pi, thetadot = 0, tau = 0
P = pendulum.linearize([np.pi, 0], [0])
ctrb_matrix = ctl.ctrb(P.A, P.B) # Controllability matrix
rank = np.linalg.matrix_rank(ctrb_matrix)
determinant = np.linalg.det(ctrb_matrix)
print(f"Determinant: {determinant} (nonzero means full rank)")
print(f"Controllability matrix:\n{ctrb_matrix}")
print(f"Rank: {rank} (should be {P.A.shape[0]} for controllable system)")Determinant: -1.0 (nonzero means full rank)
Controllability matrix:
[[ 0. 1. ]
[ 1. -0.5]]
Rank: 2 (should be 2 for controllable system)
To compute the gains , we make use of the place command, applied to the linearized system:
# Place the closed loop eigenvalues (poles) at desired locations
# Assume the desired poles are at -1 +/- 0.1j
K = ctl.place(P.A, P.B, [-1 + 0.1j, -1 - 0.1j])
#K = ctl.place(P.A, P.B, [-2, -1.0])
print(f"Feedback gain K = {K}")
# Compute feedforward gain for reference tracking
# For pendulum, C = [1, 0] to extract theta from state
C = np.array([[1, 0]]) # Output matrix for theta
A_cl = P.A - P.B @ K # Closed-loop A matrix
Kf = -1 / (C @ np.linalg.inv(A_cl) @ P.B)[0, 0] # [0, 0] extracts the single element from this 1×1 matrix
print(f"Feedforward gain Kf = {Kf}")Feedback gain K = [[10.82 1.5 ]]
Feedforward gain Kf = 1.0099999999999998
Now we can obtain the controller
def statefbk_output(t, x, u, params):
K = params.get('K', np.array([0, 0]))
Kf = params.get('Kf', 0)
# Current state from pendulum
x_current = u[0:2] # [theta, thetadot]
r = u[2] # Reference input (desired theta)
# operating point where we linearized
x_d = np.array([np.pi, 0]) # [theta_eq, thetadot_eq]
# Controller: \tilde{u} = -K*\tilde{x} + Kf * \tilde{r}
# we need to switch to the original
return -K @ (x_current - x_d) + Kf * (r - np.pi)
# Create the state feedback controller as a nonlinear system
statefbk = ctl.nlsys(
None, statefbk_output, name="k_ctrl",
inputs=['theta', 'thetadot', 'r'], outputs='tau'
)
print(statefbk)<NonlinearIOSystem>: k_ctrl
Inputs (3): ['theta', 'thetadot', 'r']
Outputs (1): ['tau']
States (0): []
Update: <function NonlinearIOSystem.__init__.<locals>.<lambda> at 0x7d1e3c789080>
Output: <function statefbk_output at 0x7d1e3c7885e0>
After defining the state-feedback controller, we can connect it to the pendulum system to create a closed-loop system.
clsys_sf = ctl.interconnect(
[pendulum, statefbk], name='pendulum w/ state feedback',
inputs=['r'], outputs=['theta'], params={'K': K, 'Kf': Kf})
print(clsys_sf)<InterconnectedSystem>: pendulum w/ state feedback
Inputs (1): ['r']
Outputs (1): ['theta']
States (2): ['pendulum_theta', 'pendulum_thetadot']
Subsystems (2):
* <NonlinearIOSystem pendulum: ['tau'] -> ['theta']>
* <NonlinearIOSystem k_ctrl: ['theta', 'thetadot', 'r'] -> ['tau']>
Connections:
* pendulum.tau <- k_ctrl.tau
* k_ctrl.theta <- pendulum.theta
* k_ctrl.thetadot <-
* k_ctrl.r <- r
Outputs:
* theta <- pendulum.theta
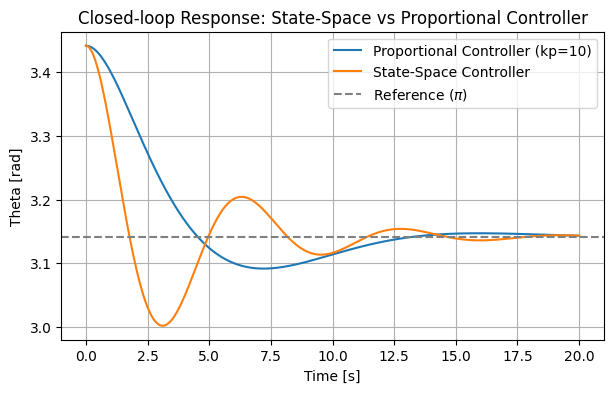
Now we can see how the designed state-feedback controller will influence the system. We can visulize this through the same response.
# Compare the performance of state-space controller vs proportional controller
# Simulate state-space controller (closed-loop)
sf_response = ctl.input_output_response(
clsys_sf, timepts, U=np.full_like(timepts, np.pi), X0=x0, return_x=True
)
# Simulate proportional controller (closed-loop)
p_response = ctl.input_output_response(
clsys, timepts, U=np.full_like(timepts, np.pi), X0=x0, params={'kp': 10}, return_x=True
)
plt.plot(timepts, p_response.outputs, label='Proportional Controller (kp=10)')
plt.plot(timepts, sf_response.outputs, label='State-Space Controller')
plt.axhline(np.pi, color='gray', linestyle='--', label='Reference ($\pi$)')
plt.xlabel('Time [s]')
plt.ylabel('Theta [rad]')
plt.title('Closed-loop Response: State-Space vs Proportional Controller')
plt.legend()
plt.show()<>:15: SyntaxWarning: invalid escape sequence '\p'
<>:15: SyntaxWarning: invalid escape sequence '\p'
/tmp/ipython-input-343988928.py:15: SyntaxWarning: invalid escape sequence '\p'
plt.axhline(np.pi, color='gray', linestyle='--', label='Reference ($\pi$)')
Things to try¶
Here are some things to try with the above code:
Try changing the locations of the closed loop eigenvalues in the
placecommand to make the repose better than the proportional controller.Try leaving the state space controller fixed but changing the parameters of the system dynamics (, , ). Does the controller still stabilize the system?
HW problems¶
Problem 1: Servo Mechanism State-Feedback Control¶
Consider the same servo mechanism again. The equations of motion for the system are given by
where
is the rotational inertia of the arm (kg·m²)
is the viscous damping coefficient (N·m·s/rad)
is the linear spring constant (N/m)
is the effective radius or lever arm where the spring force acts (m)
Define the state vector and output . The dynamics can be written in state-space form: , with as
In the previous lab, we have linearized the system around to obtain , , , matrices. Now we will practice controller design and analysis for the linearized system, similar to the tasks in this lab.
Programming problem: Check the controllability of the linearized system using the controllability matrix and its rank.
Programming problem: Design a state-feedback controller to track the desired position by placing the closed-loop eigenvalues at . Compute the state feedback gain and the feedforward gain for reference tracking.
Programming problem: Simulate and plot the response of the closed-loop system when starts at two different initial angles and . Compare the closed-loop response to the open-loop response (i.e., no control is applied).
Problem 2: Cart–Pole State Feedback Control¶
For this problem, we will consider the cart–pole system. The equations of motion for the system are given by
where
: cart position
: pole angle measured from vertical (counter-clockwise positive)
: gravitational constant
: horizontal force input to the cart
Define the state vector, output, and control input as
so the dynamics can be written as .
Use the following parameters:
Last Lab we have linearized the system around the upward equilibrium to get the matrices.
Programming Problem: Check the controllability of the linearized system using the controllability matrix and its rank.
Programming Problem: Design a state-feedback controller to stabilize the pendulum at by placing the closed-loop eigenvalues at the following locations:
,
,
Compute the state feedback gain and the feedforward gain for reference tracking.
Programming Problem: Simulate and plot the response of the closed-loop system when the pendulum starts at . Compare the closed-loop response to the open-loop response (i.e., no control is applied).